My research tries to bring common sense understanding to robotic perception.
Interacting with the environment requires to perceive objects and understand how actions influence their movement ad shape.
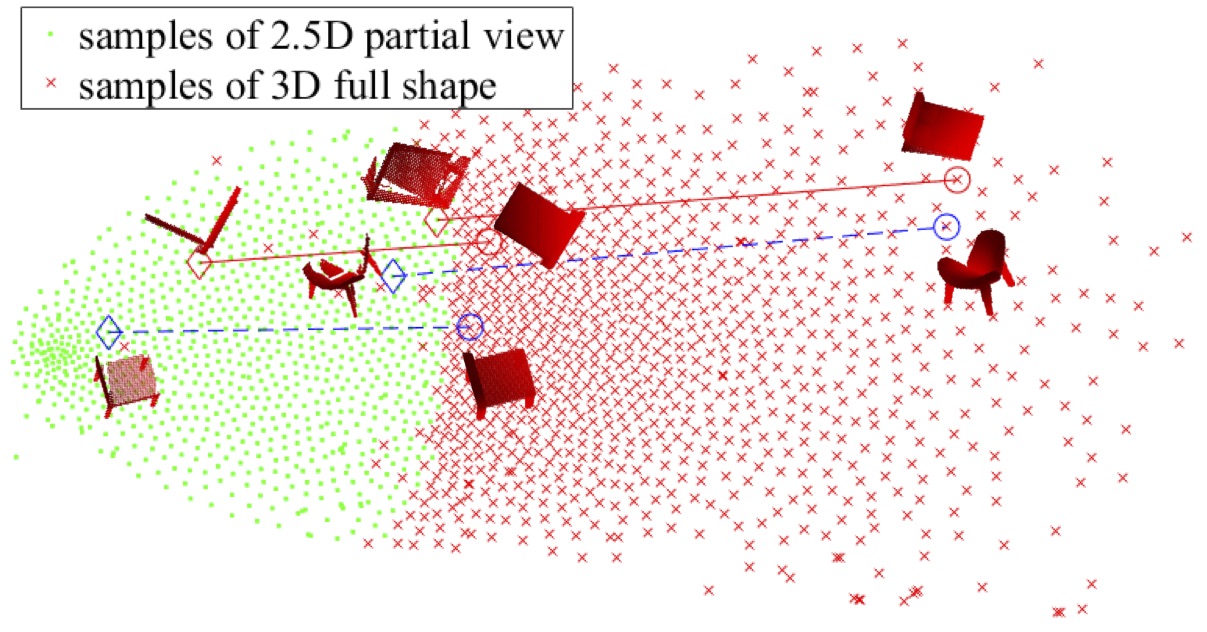
Generative perception models can make sense of partial and noisy observations and reconstruct their shape and semantics
(Hu et al., 2021), (Hu et al., 2020), (Yang et al., 2018),
.
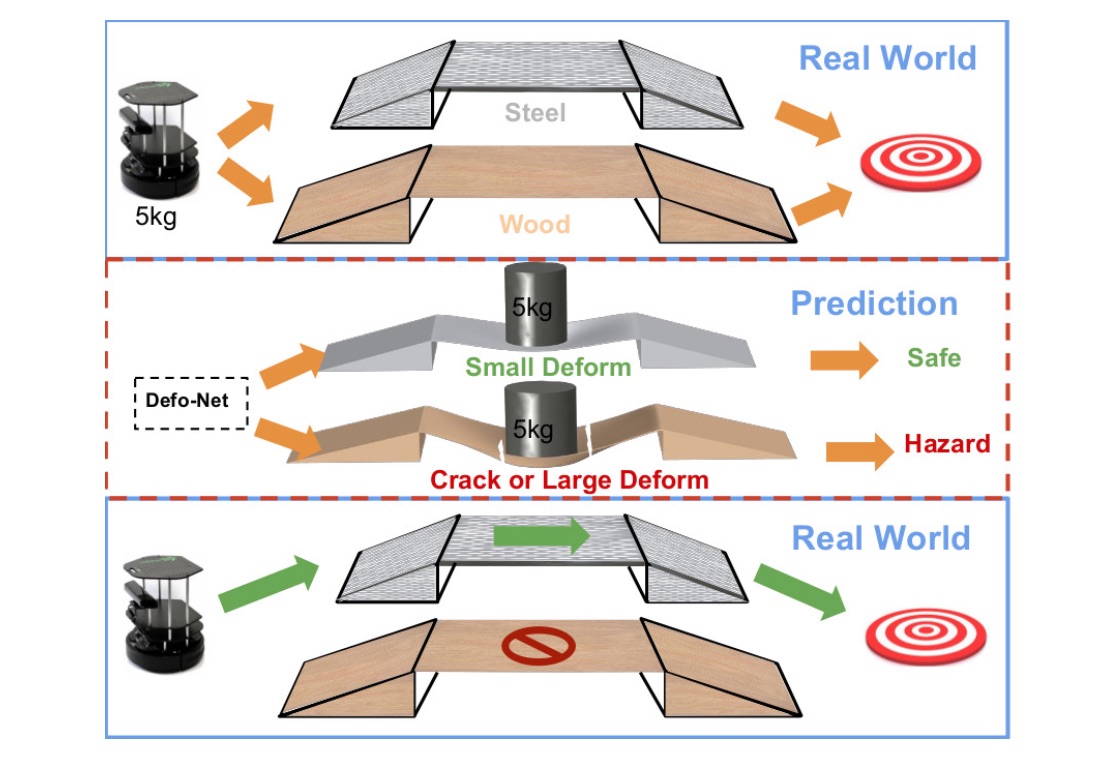
Understanding the intuitive physics of interacting with objects will provide
next-generation automonous agents with a common sense knowledge base for interacting with a complex, dynamic environment
(Wang et al., 2018), (Wang et al., 2018), (Wang et al., 2018)
.
References
2021
-
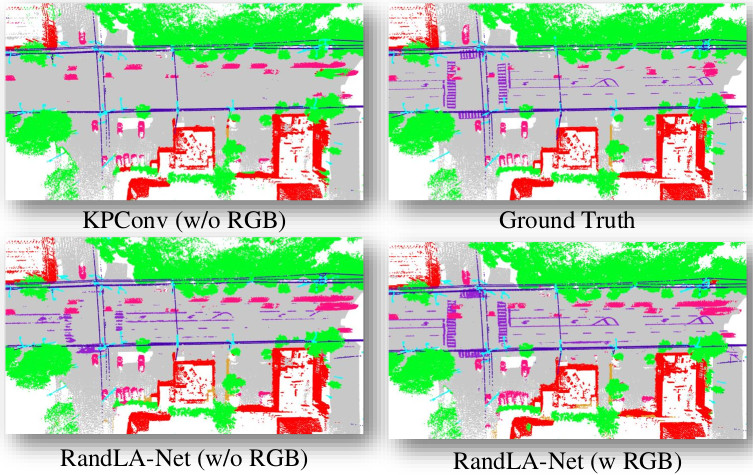
Learning semantic segmentation of large-scale point clouds with random sampling
Qingyong
Hu, Bo
Yang, Linhai
Xie, and
5 more authors
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
2020
-
Randla-net: Efficient semantic segmentation of large-scale point clouds
Qingyong
Hu, Bo
Yang, Linhai
Xie, and
5 more authors
In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020
We show that random sampling combined with attention can achieve SOA performances in semantic segmentation while processing large point clouds in near real-time.
2018
-
Dense 3D object reconstruction from a single depth view
Bo
Yang, Stefano
Rosa, Andrew
Markham, and
2 more authors
IEEE transactions on pattern analysis and machine intelligence, 2018
We propose an end-to-end approach to high-resolution reconstruction of 3D objects from a single depth image. We also release a real-world dataset for 3D reconstruction. We argue that real-world benchmarks for shape reconstruction are necessary for a thorough validation of future approaches.
-
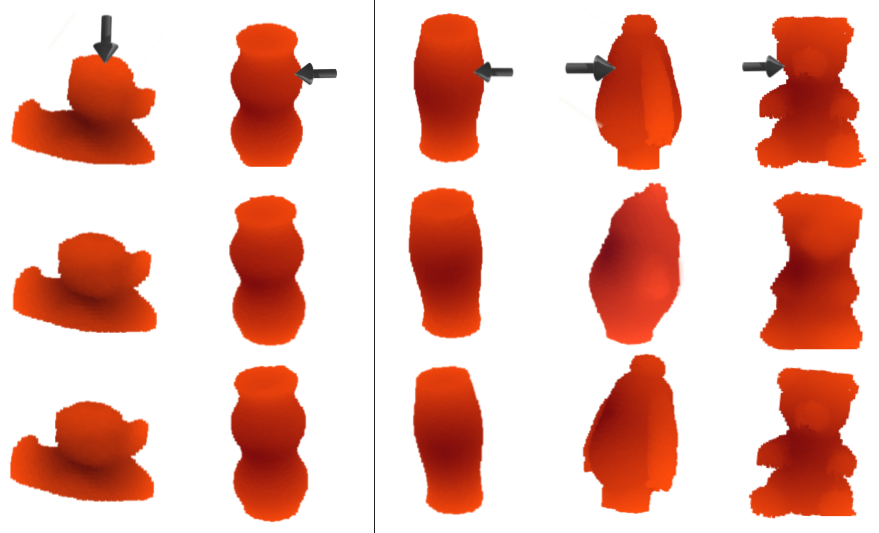
Learning the intuitive physics of non-rigid object deformations
Zhihua
Wang, Stefano
Rosa, and Andrew
Markham
In Neural Information Processing Systems (NIPS) Workshops, 2018
-
3d-physnet: Learning the intuitive physics of non-rigid object deformations
Zhihua
Wang, Stefano
Rosa, Bo
Yang, and
3 more authors
In Proceedings of the 27th International Joint Conference on Artificial Intelligence, Stockholm, SWE, 2018
We show that conditioning a generative model that predicts soft object deformations on real physical properties can improve prediction accuracy as well as enabling generalisation abilities.
-
Defo-Net: Learning body deformation using generative adversarial networks
Zhihua
Wang, Stefano
Rosa, Linhai
Xie, and
4 more authors
In 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018
We show that conditioning a generative model that predicts soft object deformations on real physical properties can improve prediction accuracy as well as enabling generalisation abilities.
 Learning semantic segmentation of large-scale point clouds with random samplingIEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
Learning semantic segmentation of large-scale point clouds with random samplingIEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
 Learning the intuitive physics of non-rigid object deformationsIn Neural Information Processing Systems (NIPS) Workshops, 2018
Learning the intuitive physics of non-rigid object deformationsIn Neural Information Processing Systems (NIPS) Workshops, 2018