I work on using human experiences to improve semantic understanding of the environment for mobile robots
(Rosa et al., 2018),(Rosa et al., 2018)
.
I study interpretable ways to learn sensor fusion strategies in deep VIO frameworks, for integrating novel sensor modalities such as
millimeter wave radar and thermal imaging into a unified framework for first responders
(Chen et al., 2022), (Saputra et al., 2020), (Lu et al., 2020), (Chen et al., 2019)
.
References
2022
-
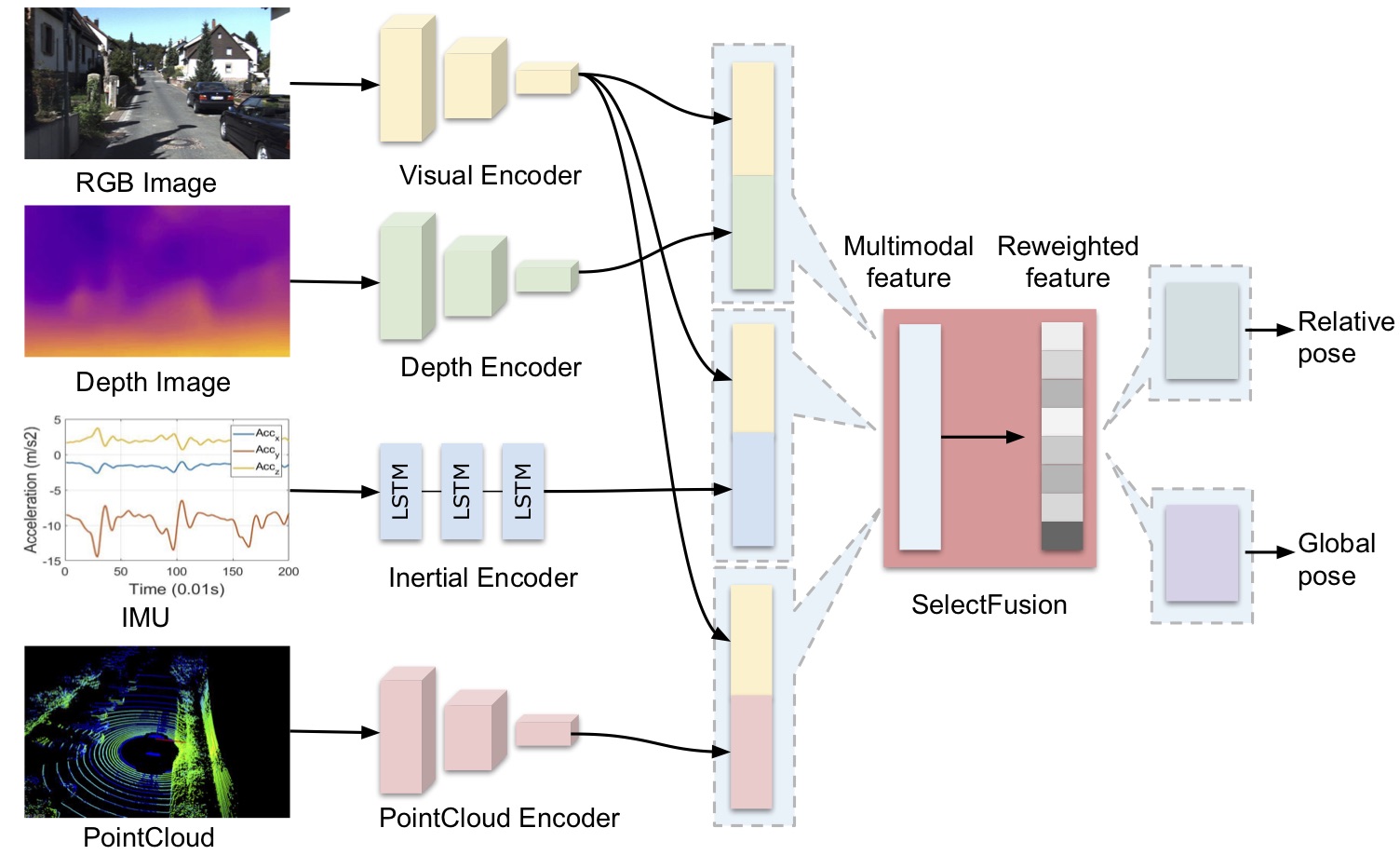
Learning selective sensor fusion for state estimation
Changhao
Chen, Stefano
Rosa, Chris Xiaoxuan
Lu, and
3 more authors
IEEE Transactions on Neural Networks and Learning Systems, 2022
we propose an end-to-end selective sensor fusion module that can be applied to modality pairs, such as monocular images and inertial measurements, depth images, and light detection and ranging (LIDAR) point clouds.
2020
-
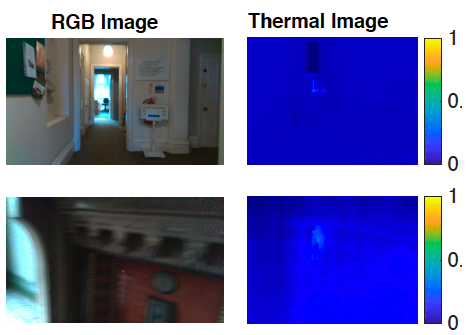
Deeptio: A deep thermal-inertial odometry with visual hallucination
Muhamad Risqi U
Saputra, Pedro PB
De Gusmao, Chris Xiaoxuan
Lu, and
7 more authors
IEEE Robotics and Automation Letters, 2020
We learn to hallucinate visual features from thermal images that can help first responders to navigate visually-denied scenarios.
-
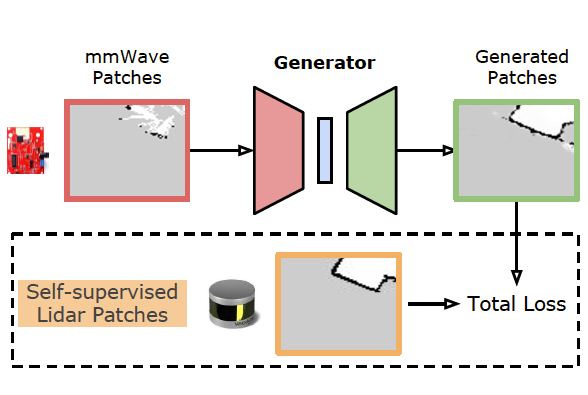
See through smoke: robust indoor mapping with low-cost mmwave radar
Chris Xiaoxuan
Lu, Stefano
Rosa, Peijun
Zhao, and
5 more authors
In Proceedings of the 18th International Conference on Mobile Systems, Applications, and Services, 2020
We show how to build dense occupancy grid maps of indoor environments from sparse, noisy mmWave measurements, with cross-modal training.
2019
-
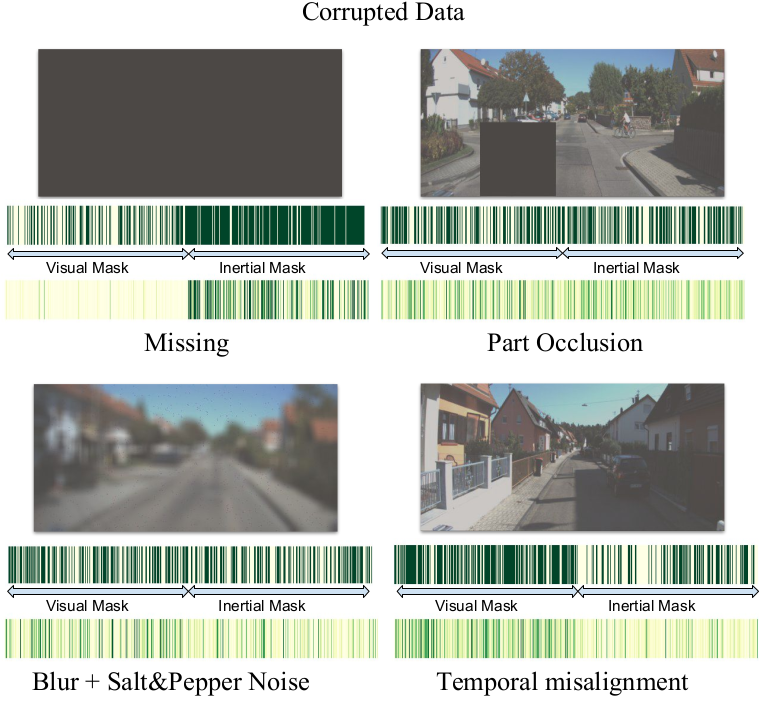
Selective sensor fusion for neural visual-inertial odometry
Changhao
Chen, Stefano
Rosa, Yishu
Miao, and
4 more authors
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019
We show how data-learned sensor fusion strategies can improve accuracy and robustness in deep VIO when dealing with noisy/corrupted data, while adding interpretability.
2018
-
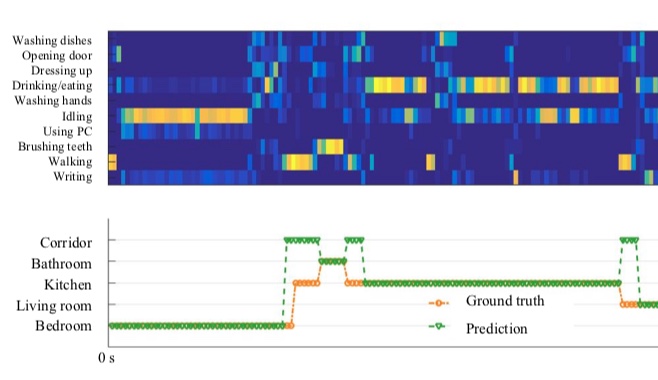
Semantic place understanding for human–robot coexistence—toward intelligent workplaces
Stefano
Rosa, Andrea
Patane, Chris Xiaoxuan
Lu, and
1 more author
IEEE Transactions on Human-Machine Systems, 2018
Robots and users can work synergistically by mutually learning over time, and benefitting from each other by exploiting each other’s strengths. We show how detecting user activities can help robots to learn semantic understanding of the environment, while at the same time learning to better localise the user.
-
CommonSense: Collaborative learning of scene semantics by robots and humans
Stefano
Rosa, Andrea
Patanè, Xiaoxuan
Lu, and
1 more author
In Proceedings of the 1st International Workshop on Internet of People, Assistive Robots and Things, 2018
 CommonSense: Collaborative learning of scene semantics by robots and humansIn Proceedings of the 1st International Workshop on Internet of People, Assistive Robots and Things, 2018
CommonSense: Collaborative learning of scene semantics by robots and humansIn Proceedings of the 1st International Workshop on Internet of People, Assistive Robots and Things, 2018