publications
publications in reversed chronological order.
2025
2024



2022
2021
-
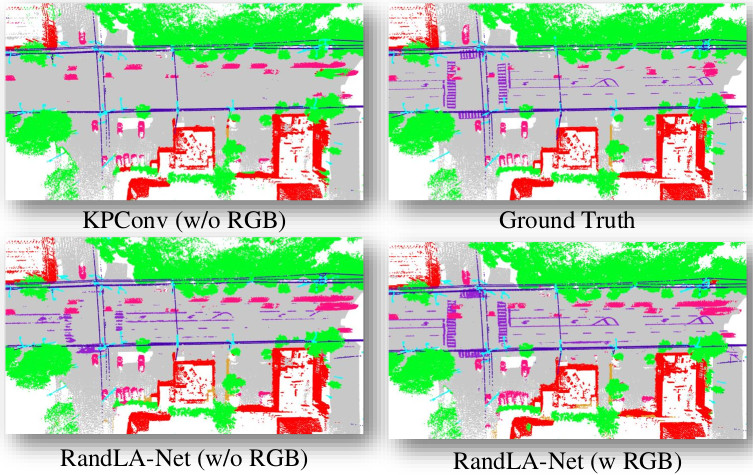 Learning semantic segmentation of large-scale point clouds with random samplingIEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
Learning semantic segmentation of large-scale point clouds with random samplingIEEE Transactions on Pattern Analysis and Machine Intelligence, 2021
2020
2019
2018
-
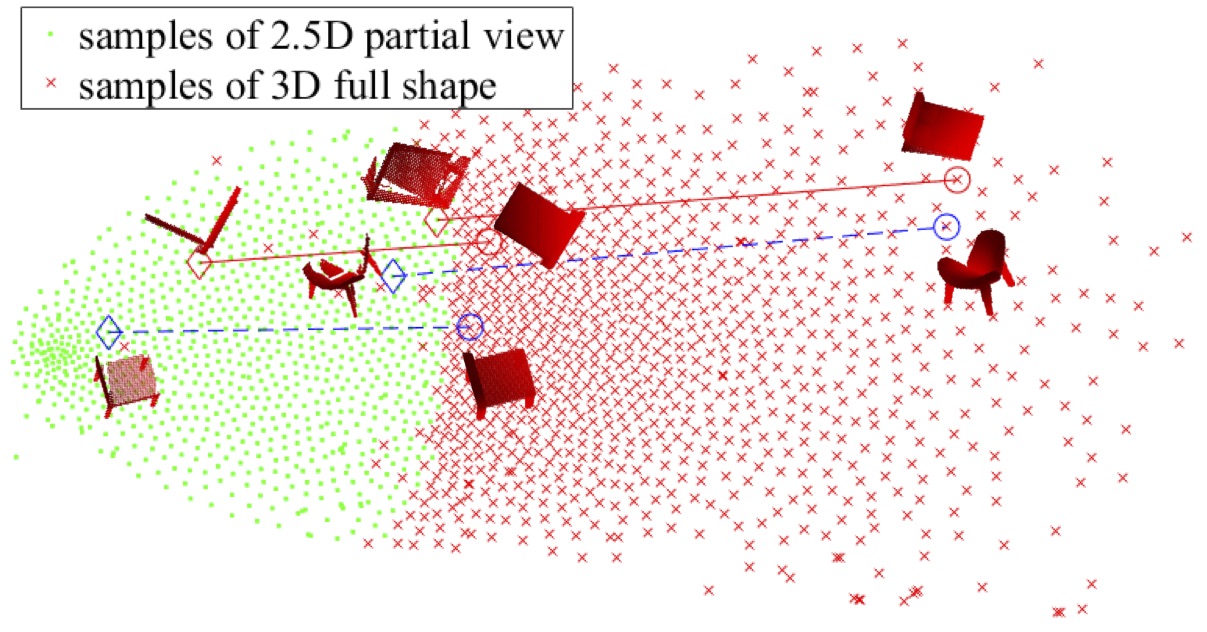
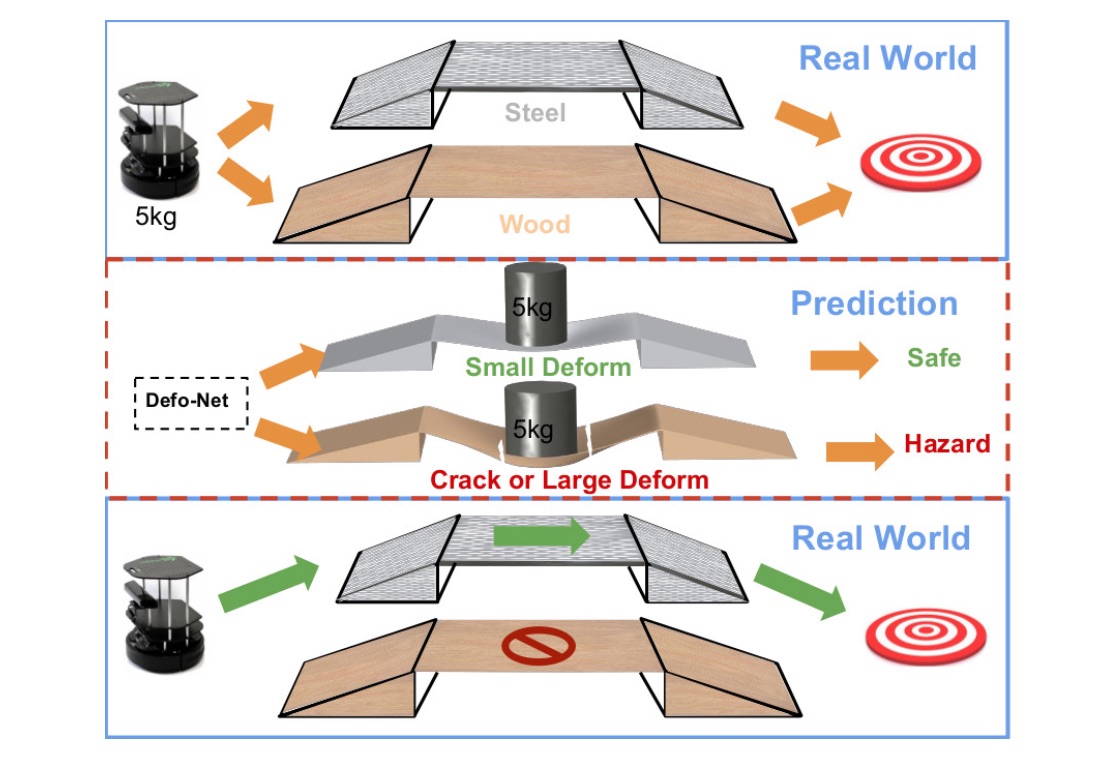
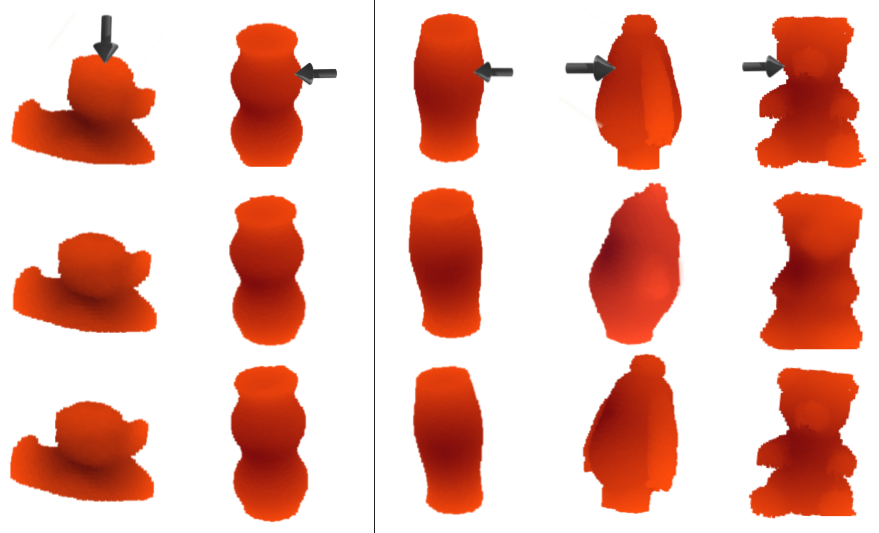 Learning the intuitive physics of non-rigid object deformationsIn Neural Information Processing Systems (NIPS) Workshops, 2018
Learning the intuitive physics of non-rigid object deformationsIn Neural Information Processing Systems (NIPS) Workshops, 2018 -
 CommonSense: Collaborative learning of scene semantics by robots and humansIn Proceedings of the 1st International Workshop on Internet of People, Assistive Robots and Things, 2018
CommonSense: Collaborative learning of scene semantics by robots and humansIn Proceedings of the 1st International Workshop on Internet of People, Assistive Robots and Things, 2018 -
Automatic Face Recognition Adaptation via Ambient Wireless IdentifiersIn Proceedings of the 16th ACM Conference on Embedded Networked Sensor Systems, 2018
-
EXPLORING NEW FUNCTIONALITIES IN CULTURAL HERITAGE SPACES-DESIGNING DIFFERENT MUSEUM TRAILS WITH LOW COST TECHNOLOGIESIn DS 92: Proceedings of the DESIGN 2018 15th International Design Conference, 2018
-
Q-PSO: Fast quaternion-based pose estimation from RGB-D imagesJournal of Intelligent & Robotic Systems, 2018

2017
-
Towards self-supervised face labeling via cross-modality associationIn Proceedings of the 15th ACM Conference on Embedded Network Sensor Systems, 2017
-
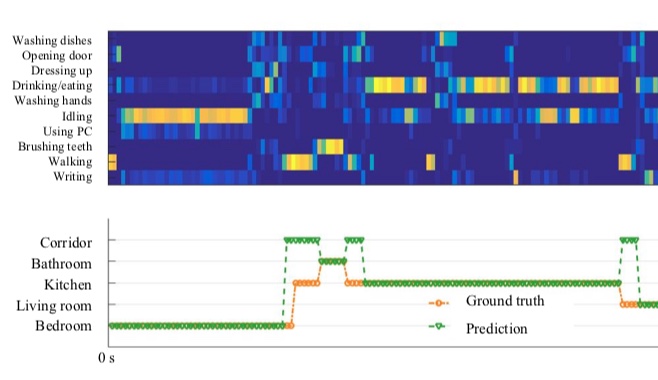
Tracking a subset of skeleton joints: an effective approach towards complex human activity recognitionJournal of Robotics, 2017
-
Leveraging user activities and mobile robots for semantic mapping and user localizationIn Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, 2017
2016
-
Fast graph-based object segmentation for rgb-d imagesIn Proceedings of SAI Intelligent Systems Conference, 2016
-
A novel cloud-based service robotics application to data center environmental monitoringSensors, 2016
-
Fast feature-less quaternion-based particle swarm optimization for object pose estimation from rgb-d imagesIn Proceedings of the British Machine Vision Conference 2016‚ BMVC 2016‚ York‚ UK‚ 19−22 September‚ 2016, 2016
-
Service robotics for data centers monitoringIn IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, 2016
-
An application of laser-based autonomous navigation for data-center monitoringIn Intelligent Autonomous Systems 13: Proceedings of the 13th International Conference IAS-13, 2016
-
A Kinect-Based Front-End for Graph-SLAM Using Plane Matching in Planar Indoor EnvironmentsIn Intelligent Autonomous Systems 13: Proceedings of the 13th International Conference IAS-13, 2016
-
Leveraging open data for supporting a cloud robotics service in a smart city environmentIn Intelligent Autonomous Systems 13: Proceedings of the 13th International Conference IAS-13, 2016
-
Vocal interaction with a 7-DOF robotic arm for object detection, learning and graspingIn 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2016
-
Fly4SmartCity: A cloud robotics service for smart city applicationsJournal of Ambient Intelligence and Smart Environments, 2016
2015
-
From a Robotic Vacuum Cleaner to Robot Companion: Acceptance and Engagement in Domestic EnvironmentsIn Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, 2015
-
Sliding autonomy in cloud robotics services for smart city applicationsIn Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, 2015
-
PARLOMA–a novel human-robot interaction system for deaf-blind remote communicationInternational Journal of Advanced Robotic Systems, 2015
-
A cloud robotics system for telepresence enabling mobility impaired people to enjoy the whole museum experienceIn 2015 10th International Conference on Design & Technology of Integrated Systems in Nanoscale Era (DTIS), 2015
-
ORIENTOMA: A novel platform for autonomous and safe navigation for blind and visually impairedIn 2015 10th International Conference on Design & Technology of Integrated Systems in Nanoscale Era (DTIS), 2015
-
Leveraging the cloud for connected service robotics applicationsIn 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), 2015
-
Loop detection in robotic navigation using MPEG CDVSIn 2015 IEEE 17th International Workshop on Multimedia Signal Processing (MMSP), 2015
2014
-
A ros implementation of the mono-slam algorithmInternational Journal of Computer Science & Information Technology, 2014
-
Supervision and monitoring of logistic spaces by a cooperative robot team: methodologies, problems, and solutionsIntelligent Service Robotics, 2014
-
Scan matching for graph slam in indoor dynamic scenariosIn The Twenty-Seventh International Flairs Conference, 2014
-
Skeleton tracking based complex human activity recognition using kinect cameraIn Social Robotics: 6th International Conference, ICSR 2014, Sydney, NSW, Australia, October 27-29, 2014. Proceedings 6, 2014
-
Real-time single camera hand gesture recognition system for remote deaf-blind communicationIn Augmented and Virtual Reality: First International Conference, AVR 2014, Lecce, Italy, September 17-20, 2014, Revised Selected Papers 1, 2014
-
Towards a ROS-based autonomous cloud robotics platform for data center monitoringIn Proceedings of the 2014 IEEE Emerging Technology and Factory Automation (ETFA), 2014
-
A cloud based service for management and planning of autonomous UAV missions in smart city scenariosIn Modelling and Simulation for Autonomous Systems: First International Workshop, MESAS 2014, Rome, Italy, May 5-6, 2014, Revised Selected Papers 1, 2014
-
Graph-based robust localization and mapping for autonomous mobile robotic navigationIn 2014 IEEE International Conference on Mechatronics and Automation, 2014
2013
-
Multirobot localization in highly symmetrical environmentsJournal of Intelligent & Robotic Systems, 2013
-
Blurring prediction in monocular slamIn 2013 8th IEEE Design and Test Symposium, 2013
2012
-
Object tracking with adaptive HOG detector and adaptive Rao-Blackwellised particle filterIn Intelligent Robots and Computer Vision XXIX: Algorithms and Techniques, 2012
-
Graph optimization with unstructured covariance: fast, accurate, linear approximationSimulation, Modeling, and Programming for Autonomous Robots, 2012
2011
-
HExEC: Hand Exoskeleton Electromyographic ControlIn 4th International Workshop on Human Friendly Robotics (HFR 2011), Twente, The Netherlands, 2011
2010
-
Map updating in dynamic environmentsIn ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics), 2010
-
An Application of Omnidirectional Vision to Grid-based SLAM in Indoor EnvironmentsIn Workshop on Omnidirectional Robot Vision, International Conference on Robotics and Automation (ICRA 2010), 2010
-
Multi-robot map updating in dynamic environmentsIn 10th International Symposium on Distributed Autonomous Robotics Systems, 2010
2009
-
Hybrid localization solutions for robotic logistic applicationsIn 2009 IEEE International Conference on Technologies for Practical Robot Applications, 2009
-
Three-State Multirobot Collaborative Localization in Symmetrical EnvironmentsIn ROBOTICA 2009, 2009
2008
-
Switching multirobot collaborative localization in symmetrical environmentsIn IEEE International Conference on Intelligent RObots Systems (IROS 2008), 2nd Workshop on Planning, Perception and Navigation for Intelligent Vehicles (PPNIV), 2008